MotionSqueeze Neural Motion FeatureLearning for Video Understanding
Contents
#MotionSqueeze: Neural Motion Feature Learning for Video Understanding
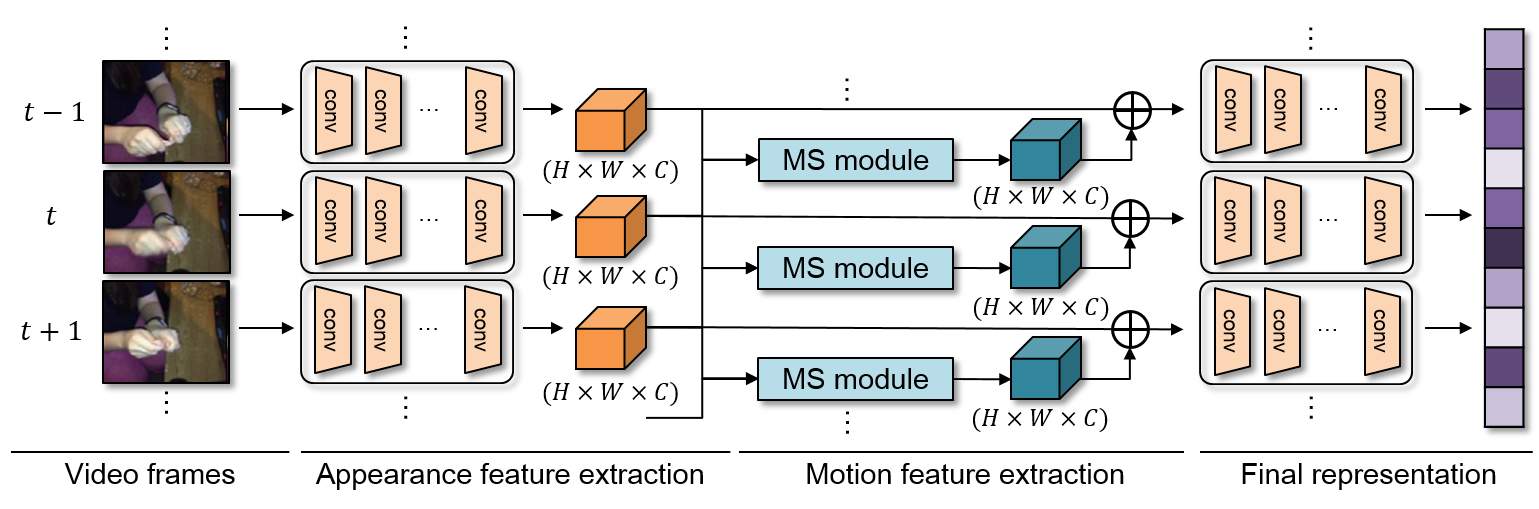
主要的创新点是MS module,它把这个结构插入到了ResNet的网络中间,具体来说在layer2之后,layer3之前。
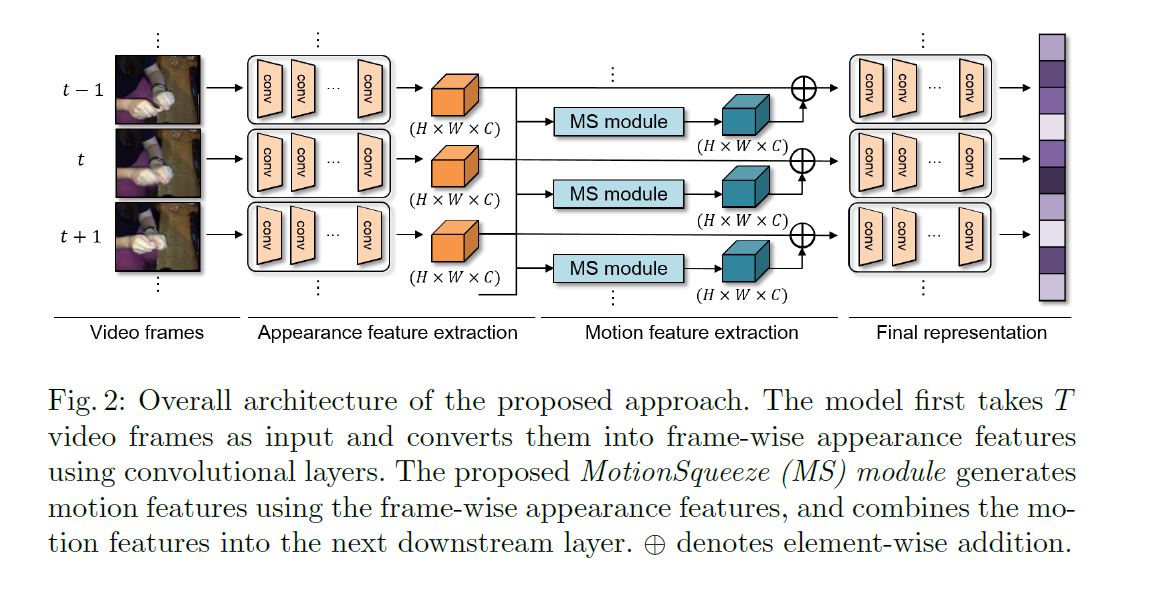
逻辑上如下图所示,道理上说得很清楚,首先进行关联性计算,就是为了判断当前的点可能会位移到什么位置,即什么位置的点最有可能是由当前的点位移过去的。
然后通过估计上的点,计算偏移。
最后计算特征转换。(这个其实我没太理解)
#相关工作
对于一个视频来说,动作是最显著的特征,动作模型提取得好,识别的准确率就会提高。
卷积在捕获平移等变化的模型上具备有效性,但是对相对运动的物体上建模就很难让人感到满意。
convolution is effective in capturing translation-equivariant patterns but not in modeling relative movement of objects
论文的主要工作放在如何学习动作特征上。
we focus on efficient learning of motion features.
一些现有的研究方向进展:
- 有一些在推理部分不需要光流输入,但是训练仍然需要的。
- 通过计算特征的时空梯度来表征动作特征。
- 提出了一种卷积模块,通过在外观特征之间进行空间移动和减法运算来提取运动特征。
- 计算卷积神经网络中间层的特征层光流,虽然效果很好,但是需要很高的计算量,因为在网络中间层进行操作。
光流估计方法:
- 对特征图构建张量,并对张量进行回归。
- 通过堆叠的特征层来进行粗略的光流估计。
不过这些方法都需要光流图做ground-truth。
最近的一些相关工作:
- 利用连续帧的特征图之间的相关信息来代替光学图像。不过这个完整模型的大小与双流网络相当。
- 提出
correspondences proposal模块来学习视频间的联系。
#MS模块
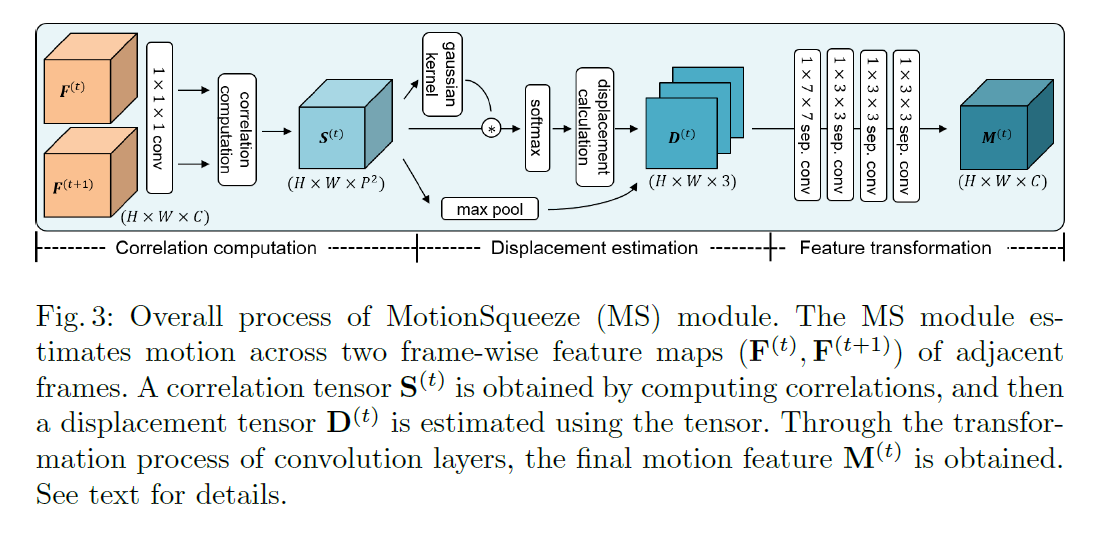
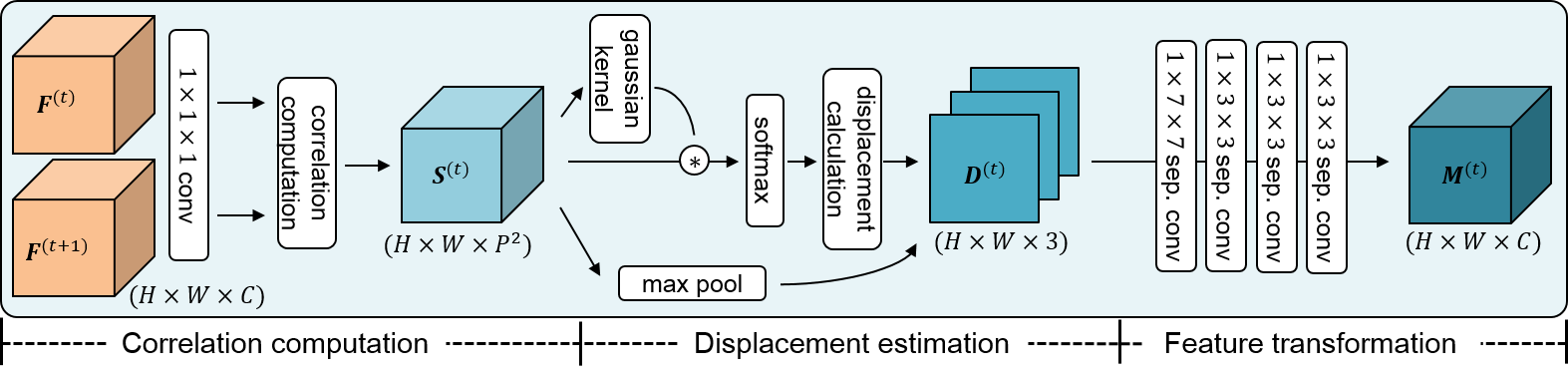
主要分为三个步骤相关性计算(correlation computation)、位移估计(displacement estimation)和特征变换(feature transformation)。
#相关性计算
定义给定的某一个特征层的输入特征图$\mathbf{F}^{(t)}$和$\mathbf{F}^{(t+1)}$,$\mathbf{F}$的大小为:
$$
\mathbf{F} \in \mathbb{R}^{C \times H \times W}
$$
对于某一个位置$\mathbf{x}$和位移$\mathbf{p}$的相关性可以通过下列公式得到:
$$ s(\mathbf{x},\mathbf{p},t)=\mathbf{F}^{(t)}_{\mathbf{x}} \cdot \mathbf{F}^{(t+1)}_{\mathbf{x}+\mathbf{p}} $$$\cdot$代表点积。
为了保证计算效率,同时也可以从经验中得到其实一个位置的运动相对不会很大(鉴于数据集是25帧-56帧不等,其实也还是蛮大的)[1],$\mathbf{p}$有一个范围$\mathbf{p}\in[-k,k]^2$。
最终相关性结果为:
$$
\mathbf{S}^{(t)} \in \mathbb{R}^{H \times W \times P^2}, P=2k+1
$$
这个计算量与$P^2$个$1 \times 1$的卷积核计算量相当,整个视频的FLOPs为$T H W C P^2$。
在计算相关性之前,先在前面进行一次卷积操作,目的是为了对这些特征通道进行加权,进而来学习相关的视觉联系。
We apply a convolution layer before computing correlations, which learns to weight informative feature channels for learning visual correspondences.
#位移估计
在前面,我们已经得到了某个点,与这个点在下一帧图像中周围点的相关性张量,然后就可以找出这里面相关性最大的点做位移估计。
最简单且最有效地方法当然是直接用$\mathrm{argmax}_{\mathbf{p}}s(\mathbf{x},\mathbf{p},t)$来计算,但是这个方法是不可微的,所以用一个替代方法:soft-argmax,定义如下:
$$
d(\mathbf{x},t) = \sum_{\mathbf{p}} \frac{\exp(s(\mathbf{x},\mathbf{p},t))}{\sum_{\mathbf{p}’}{\exp(s(\mathbf{x},\mathbf{p}’,t))}} \mathbf{p}.
$$
但是这个方法会对周围的噪点比较敏感,因为他受所有的点的值影响,解决方法是:kernel-soft-argmax,思路是对非中心点进行抑制,所以得到的结果大部分会来自中心点,及周围相关的点:
$$
d(\mathbf{x},t) = \sum_{\mathbf{p}} \frac{\exp(g(\mathbf{x},\mathbf{p},t)s(\mathbf{x},\mathbf{p},t) / \tau )}{\sum_{\mathbf{p}’}{\exp( g(\mathbf{x},\mathbf{p}’,t) s(\mathbf{x},\mathbf{p}’,t) / \tau )}} \mathbf{p},
$$
$$
g(\mathbf{x},\mathbf{p},t) = \frac{1}{\sqrt{2\pi}\sigma}\exp(\frac{\mathbf{p}-\mathrm{argmax}_{\mathbf{p}}s(\mathbf{x},\mathbf{p},t)}{\sigma^{2}})
$$
根据经验,令$\sigma=5$。$\tau$是一个温度因子,用来调节softmax的分布,随着$\tau$的下降,softmax表现为argmax,令$\tau=0.01$。
除此之外,使用相关置信度图作为辅助运动信息,求解方法是对每个位置点$\mathbf{x}$进行最大池化:
$$
s^{*}(\mathbf{x},t) =\max_{\mathbf{p}}s(\mathbf{x},\mathbf{p},t)
$$
$$
\mathbf{S}^* \in \mathbb{R}^{H \times W \times 1}
$$
论文里说位移估计最后出来有两个通道,但是我目前还不知道为什么是双通道,待到看代码应该可以知道。
然后把两通道和上面的单通道合并,得到位移估计张量:
$$
\mathbf{D}^{(t)} \in \mathbb{R}^{H \times W \times 3}
$$
#特征变换
用四层卷积卷,depth-wise separable convolution,因为上述特征都是通过两帧相减得到的,所以最后会少一个特征,论文直接令$\mathbf{M}^{(T)}=\mathbf{M}^{(T-1)}$,$\mathbf{M}^{(T)}$是上一步的$\mathbf{D}^{(T)}$卷积得到的。
经过卷积操作,也恢复成了原来的尺寸:
$$
\mathbf{D}^{(t)} \in \mathbb{R}^{H \times W \times C}
$$
最终的结果会加回到原来的特征图上,论文通过做实验发现这样效果最好:
$$
\mathbf{F}’^{(t)} =\mathbf{F}^{(t)} + \mathbf{M}^{(t)}
$$
#详细代码
1 | x = self.layer1(x) |
首先是代码入口,代码就是在ResNet的层之间添加的,具体的是在layer2和layer3之间。一共有两个方法,一共是上面说的MS的计算,即flow_computation,这里出来的结果是上面说的$\mathbf{D}^{(t)}$,上面说过$\mathbf{D}^{(t)}$有三个通道,flow_1是前两个光流通道,match_v是第三个的辅助运动信息,即$\mathbf{S}^*$。第二个是MS的几个卷积层+最终的融合,就是从$\mathbf{D}^{(t)}$到$\mathbf{M}^{(t)}$再到$\mathbf{F}'^{(t)}$的过程,即flow_refinement。
然后看一下flow_computation方法:
1 | def flow_computation(self, x, pos=2, temperature=100): |
首先进行了降低通道数的操作,然后对于不同 $t$ 时刻的特征图,进行matching_layer操作,得到match张量,对应论文中的$\mathbf{S}^{(t)}$,代码如下:
1 | feature1 = self.L2normalize(feature1) |
直接写了一个forward方法,correlation_sampler调用的是一个第三方的库:
1 | self.correlation_sampler = SpatialCorrelationSampler(ks, patch, stride, pad, patch_dilation) |
总得来说就是求相关性的。
然后是match_to_flow_soft方法:
1 | def match_to_flow_soft(self, match, k, h,w, temperature=1, mode='softmax'): |
这里就可以解释上面的疑问了,为什么匹配出来的通道数是2,就是和光流一样的原因,一个是x方向上的,一个是y方向上的。
这第二句话是我自己加的,论文里只是为了保证计算效率。 ↩︎